Call us: +86-137-2353-4866
The integration of tactile sensing into robotic systems represents a significant advancement in automation and intelligent manipulation. By providing robots with a sense of touch, we can significantly expand their capabilities, enabling them to perform complex tasks that require dexterity and precise force control. At SOUSHINE, our force-sensing technology is integral to the development of sophisticated tactile sensing systems for robotic grippers and manipulators.
What is Tactile Sensing in Robotics?
Tactile sensing in robotics is the technology that enables a robot to perceive physical contact and interpret the associated forces. A tactile sensor is a device that measures parameters such as pressure distribution, shear forces, and vibration when it comes into contact with an object. For robotic grippers and manipulators, this means being able to “feel” the object it is holding. This capability is critical for tasks that involve delicate or varied objects, where visual data alone is insufficient.
Our force-sensing solutions form the core of tactile sensors, providing the raw data needed to understand the interaction between the gripper and the object. This data can include the object’s shape, texture, position, and orientation within the grasp.

How Tactile Sensing Works with Robotic Grippers
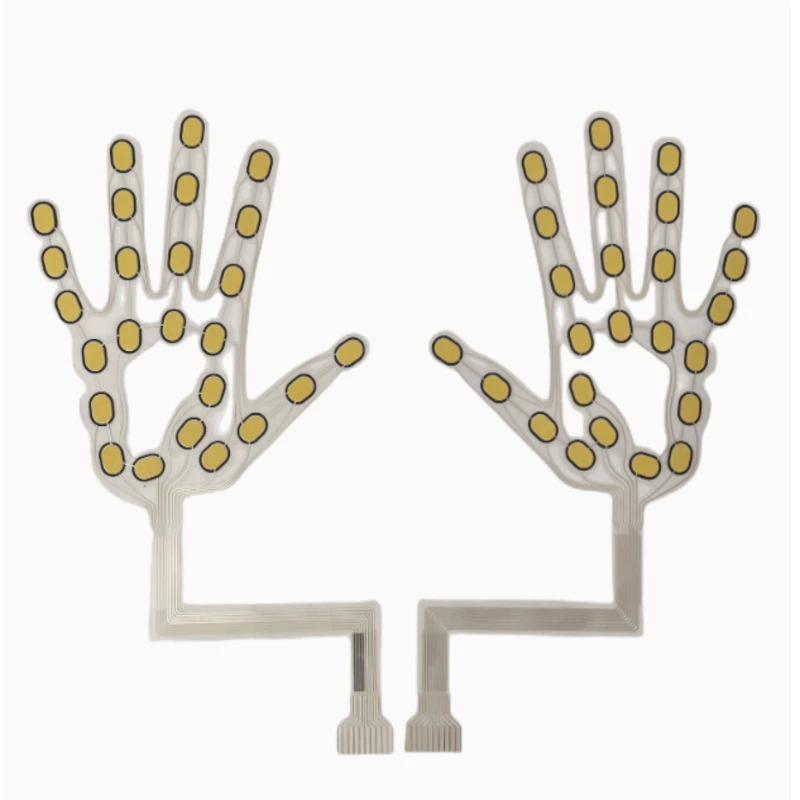
Tactile sensing systems in robotic grippers typically consist of an array of force sensors integrated into the gripper’s surfaces, often the “fingertips.” When the gripper makes contact with an object, each sensor in the array measures the force applied to its specific location. The process can be broken down into the following steps:
- Feedback and Action: Based on the interpretation of the tactile data, the robotic system can make real-time adjustments to its grip force, position, or manipulation strategy.
- Contact and Force Application: The robotic gripper or manipulator makes physical contact with an object.
- Force Transduction: Our force sensors convert the mechanical pressure into electrical signals. The magnitude of these signals is proportional to the applied force.
- Data Acquisition: The electrical signals from the sensor array are collected and transmitted to the robot’s control system.
- Signal Processing and Interpretation: The robot’s controller processes this data to create a “tactile image” or a pressure map. This map provides detailed information about the grasp, such as the contact points, the distribution of force, and potential slippage.
Why is Tactile Sensing Crucial for Robotic Manipulators?
The integration of tactile sensing provides numerous functional advantages for robotic systems, moving them beyond simple pick-and-place operations to more complex and delicate tasks.
- Adaptability to Unstructured Environments: Many real-world applications involve objects of varying sizes, shapes, and materials. Tactile sensing enables a robot to adapt its grasp and manipulation strategy on the fly, without the need for pre-programmed instructions for every possible object.
- Enhanced Grip Control: Tactile sensors allow a robot to apply the optimal amount of force to securely grip an object without causing damage. This is essential when handling fragile, deformable, or valuable items. By monitoring the force distribution, the gripper can adjust its pressure to maintain a stable grasp.
- Slip Detection and Prevention: A key advantage of tactile sensing is the ability to detect the initial signs of an object slipping. By sensing minute changes in shear force and vibration, the robot can proactively increase its grip force to prevent the object from being dropped.
- Object Recognition and Orientation: Tactile data can be used to identify objects based on their shape, size, and texture. By analyzing the pressure map created upon contact, a robot can determine the object it is holding and its orientation within the gripper. This allows for more intelligent and adaptive manipulation.
- Improved Safety in Human-Robot Collaboration: In environments where humans and robots work in close proximity, tactile sensing can act as a safety feature. If a robot manipulator unexpectedly comes into contact with a person, the tactile sensors can detect this interaction and signal the robot to stop or alter its movement.
Applications of Tactile Sensing in Robotic Grippers
The capabilities afforded by tactile sensing have led to its adoption in a wide range of industries and applications:
- Manufacturing and Assembly: For the precise handling and assembly of delicate electronic components, glass, or other sensitive materials.
- Logistics and Warehousing: In automated order fulfillment systems for gripping a wide variety of products with different packaging and fragility.
- Agriculture: For the automated harvesting of soft fruits and vegetables, where applying the correct pressure is critical to avoid bruising.
- Healthcare and Prosthetics: In advanced prosthetic hands to provide users with a sense of touch and improved control over grasped objects. Also, in surgical robots for delicate tissue manipulation.
- Research and Development: As a critical tool for researchers exploring advanced robotics, artificial intelligence, and human-robot interaction.
SOUSHINE’s force-sensing technology is designed to meet the demanding requirements of these and other applications, providing the reliability and precision needed for advanced robotic systems.
Display
FAQ
What is the difference between a force sensor and a tactile sensor?
A force sensor measures the total force applied to it, typically at a single point. A tactile sensor, on the other hand, is usually an array of force-sensing elements that can measure the distribution of force over a surface. This allows a tactile sensor to provide more detailed information, such as the shape of the contact area and pressure points.
How does tactile sensing improve robotic gripper performance?
Tactile sensing provides a robot with crucial feedback about its interaction with an object. This feedback allows for more precise control of grip force, the ability to detect and prevent slippage, and the capacity to identify objects and their orientation. This leads to more reliable, versatile, and safer robotic manipulation.
Can SOUSHINE’s force-sensing products be integrated into existing robotic grippers?
Yes, our force-sensing solutions are designed for versatility and can be integrated into a wide range of robotic gripper and manipulator designs. We offer customizable sensor solutions to meet specific application requirements.
What types of force-sensing technology does SOUSHINE use?
SOUSHINE develops and manufactures a range of force-sensing technologies suitable for tactile sensing applications. Please visit our product pages or contact our technical sales team for detailed specifications and to discuss the best solution for your needs.
How does tactile sensing contribute to automation in manufacturing?
In manufacturing, tactile sensing enables robots to handle a wider variety of components, including those that are delicate, flexible, or have complex geometries. This increases the scope of tasks that can be automated, leading to greater efficiency, reduced product damage, and improved overall productivity.